Фото: із відкритих джерел
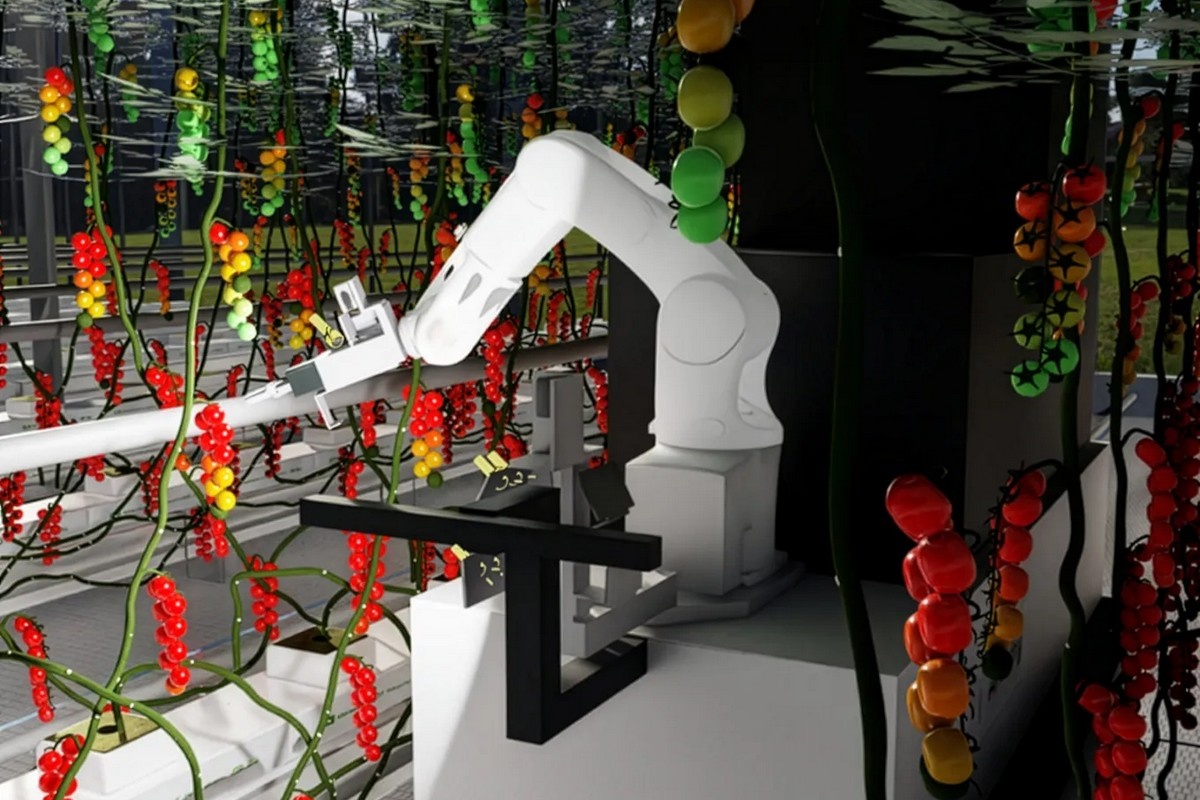
Wageningen University & Research (WUR) розробляє цифрове симульоване середовище теплиці, де робот і рослини томата взаємодіють максимально наближено до реальності. Це має зробити випробування роботів більш системними та відтворюваними, ніж у реальній теплиці.
Про це повідомляє сайт Аграрії разом з посиланням на Hortidaily.
Wageningen University & Research (WUR) досліджує, як симуляція може прискорити та уточнити розробку роботів для збирання врожаю в тепличному овочівництві. Команда створює симульоване середовище теплиці, у якому робот і рослини томата взаємодіють реалістично — з урахуванням того, що рослини ростуть, умови змінюються, а кожне збирання незворотно змінює ситуацію в рядку.
У WUR пояснюють: практичні тести в теплиці складно повторювати в однакових умовах, адже рослина — «живий» об’єкт із природною варіативністю, а після збирання частина плодів і листя вже відсутня. Тому цифровий двійник тепличного середовища має дати можливість перевіряти конструктивні рішення та системи керування роботів у систематичний і відтворюваний спосіб.
«Симуляція роботів досить поширена в контрольованих середовищах, як-от автомобільні заводи, але в тепличному садівництві це справді нове. Тут ви маєте справу з живими рослинами та значною природною варіативністю. Це робить симуляцію набагато складнішою», — зазначив дослідник WUR і керівник проєкту в команді Vision+Robotics Ар’ян Врухоп.
Як поєднують моделювання рослин і робототехніку
У межах проєкту Digital Twin у WUR об’єднали компетенції з робототехніки, симуляції, фізіології культур і 3D-моделювання. Завдання — змоделювати не лише рухи робота, а й саму культуру: її структуру, варіації та фізичні властивості. Це важливо, бо в цьому проєкті реалістична візуалізація є критичною: робот має «бачити», де розташовані плоди, і коректно взаємодіяти з ними фізично.
3D-моделі томатів створюють на основі вимірювань реальних рослин за фіксованими протоколами. За словами дослідника WUR Маартена ван дер Меера, у межах виміряних меж у модель закладають варіативність — зокрема за висотою рослини, орієнтацією листя та позицією плодів. Це дозволяє генерувати широкий набір реалістичних варіантів і окремо відпрацьовувати «складні» сценарії, коли плоди важко дістати.
«Робот має справлятися і з неідеальними ситуаціями, коли плоди важко дістати. Ми хочемо мати змогу явно тестувати такі сценарії в симуляції», — пояснив Маартен ван дер Меер.
Де застосовують симуляцію і що вже зроблено
Симуляційне середовище використовують у спільному проєкті з компанією DENSO та її дочірньою компанією Certhon, які розробляють робота для збирання томатів. У цифровій теплиці взаємодію «робот–рослина» можна перевіряти крок за кроком в однакових умовах, порівнюючи вплив змін у конструкції та оновлень програмного забезпечення.
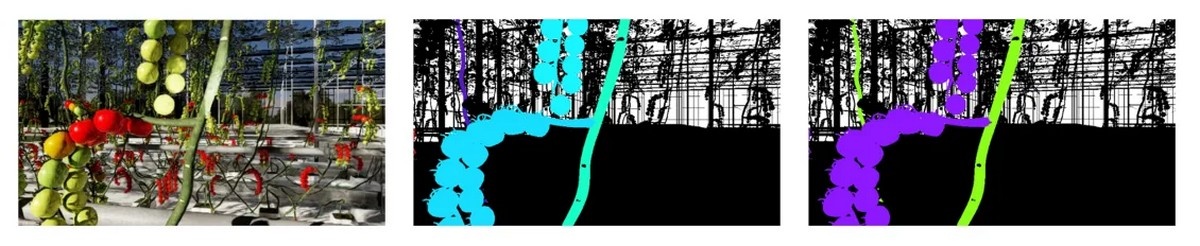
Співпраця стартувала у травні 2024 року. Відтоді, за інформацією WUR, створено працездатне симуляційне середовище, у якому змодельовано і робота, і томатну культуру. Окремий компонент — генерація синтетичних даних, зокрема семантичних та інстанс-сегментацій, які використовують для навчання моделей детекції.
На поточному етапі команда зосереджується на подальшій автоматизації тестування робота та уточненні взаємодії між роботом і рослиною. Очікуваний практичний ефект для тепличних господарств і розробників — швидше та більш послідовне оцінювання різних варіантів рішень у порівнянні з випробуваннями лише в реальній теплиці, де умови постійно змінюються.